NEUES
24.01.2025
Könnten Pilaf Maschinen im echten Leben gebaut werden? Wir haben einen Entwickler steuerbarer Roboter genau danach gefragt!
Viele Menschen träumen davon, einen Roboter zu steuern. Daher ist es nur natürlich, dass unzählige verschiedene Werke ihre eigene Version dieser Art von Robotern darstellen, wie zum Beispiel die Pilaf Maschinen aus Dragon Ball.
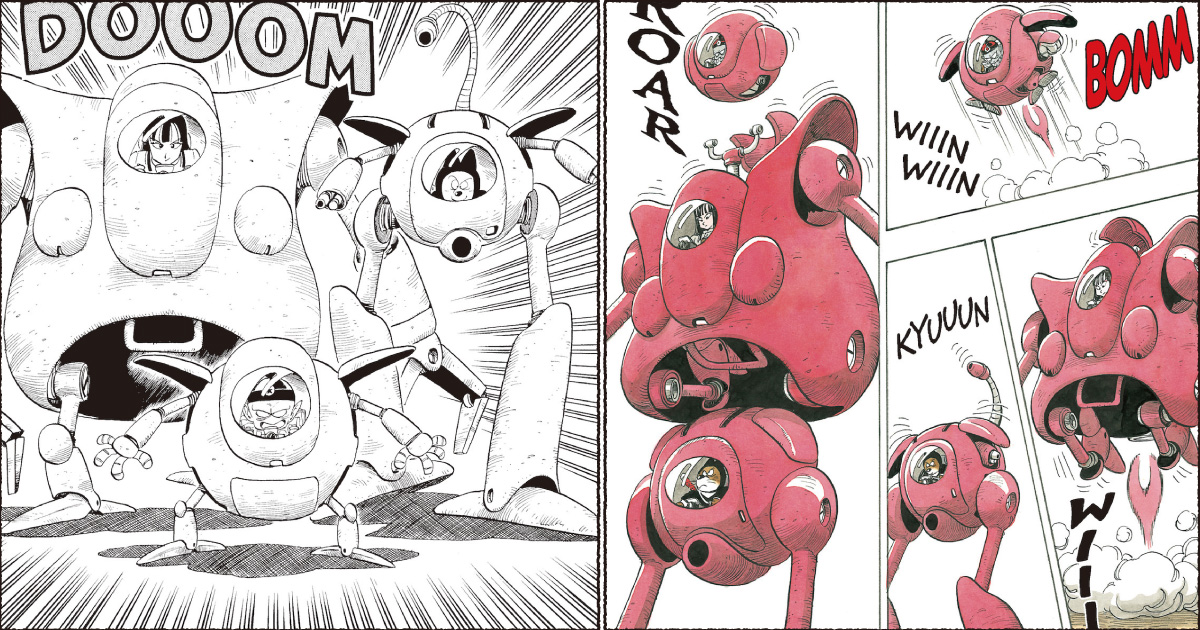
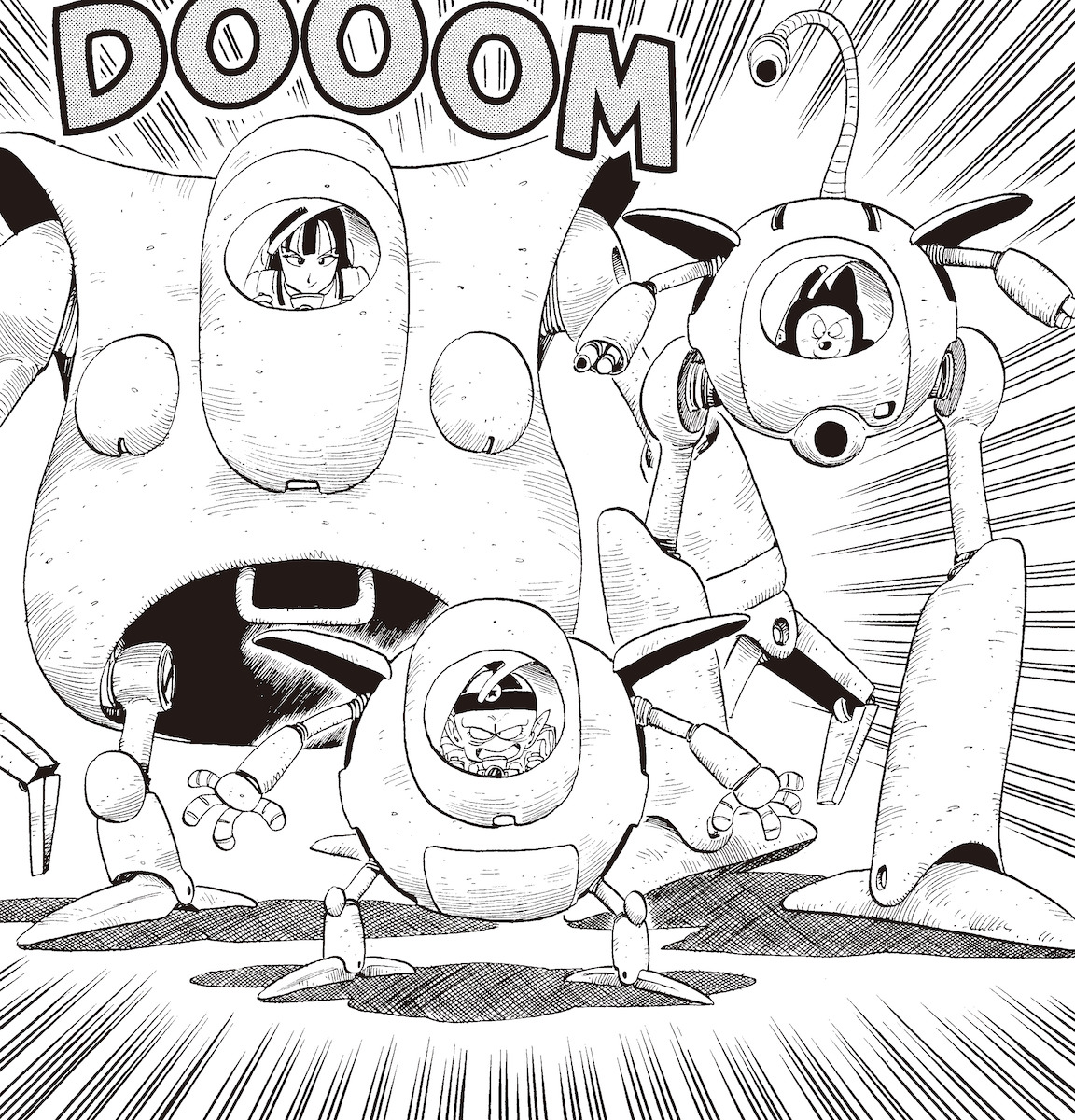
Lassen Sie sich nicht von ihrem runden und niedlichen Design täuschen; Pilaf Maschinen sind leistungsstarke, multifunktionale Roboter, die angeblich vom kleinen Kaiser selbst entwickelt wurden! Sie sind nicht nur mit einem Flammenwerfer und Raketen ausgestattet, sondern können auch kombiniert werden, um die kombinierte Pilaf Machine zu bilden!
Offenbar im Versuch, Pilaf einzuholen, hat Japan in letzter Zeit eine rasante Entwicklung bei steuerbaren Robotern erlebt. Ein bemerkenswertes Beispiel ist der ARCHAX, der von Tsubame Industries für 2023 angekündigt wurde.
.jpg?_=1785613560)
Der beeindruckende 4,5 Meter hohe und 3,5 Tonnen schwere Roboter kann mit Joysticks und Pedalen gesteuert werden und ist sogar in der Lage, sich in einen vierrädrigen „Fahrzeugmodus“ zu verwandeln. Es ist, als würde ein Mecha-Anime zum Leben erweckt! Der Preis, fragen Sie sich? Unglaubliche 400 Millionen Yen!
In diesem Interview besprechen wir die technischen Daten der Pilaf Maschinen mit dem CEO des Unternehmens, das ARCHAX entwickelt hat. Wir werden uns eingehend mit der Serie befassen, auf die Szene verweisen, in der die Pilaf Maschinen erscheinen, und uns mit der Machbarkeit eines „Kombinationsroboters“ befassen.
.jpg?_=1785613560)
Ryo Yoshida: CEO von Tsubame Industries Co., Ltd. Geboren 1998, aus der Präfektur Kanagawa. Beeinflusst von seinem Großvater, der ein Eisenwerk betrieb, lernte er schon in jungen Jahren Maschinen kennen und studierte als Student Roboterhandtechnologie. Noch während seines Studiums gründete er 2019 ALTs, ein Unternehmen, das myoelektrische Handprothesen herstellt. Er beschloss, seinen lang gehegten Traum, einen riesigen Roboter zu erschaffen, zu verwirklichen und gleichzeitig als Entwickler zu arbeiten. Im August 2021 gründete er Tsubame Industries.
— Herr Yoshida, als jemand mit Erfahrung in der Entwicklung steuerbarer Roboter möchte ich Sie fragen, was Sie über das Aussehen und die Funktionalität der Pilaf -Maschine denken.
Ryo Yoshida (im Folgenden Yoshida): Mein erster Eindruck war, dass ich dachte,die Beine sehen wirklich dünn aus. Wenn die Beine einen Körper tragen, der mit Waffen wie Raketen und Flammenwerfern ausgestattet ist, muss das Material an der Außenseite extrem dünn und leicht sein. Wenn der Körper jedoch bei einem Angriff zurückgeschleudert wird, nimmt er selbst keinen Schaden, was bedeutet, dass das Material auch sehr haltbar sein muss.
Eine Pilaf Machine mit ihren charakteristischen dünnen Beinen.
Ich bezweifle, dass esein so leichtes und haltbares Material, das es derzeit auf der Erde gibt.Ich glaube, dass die Pilaf Machine aus einem Material hergestellt sein muss, von dem wir nicht einmal wissen.
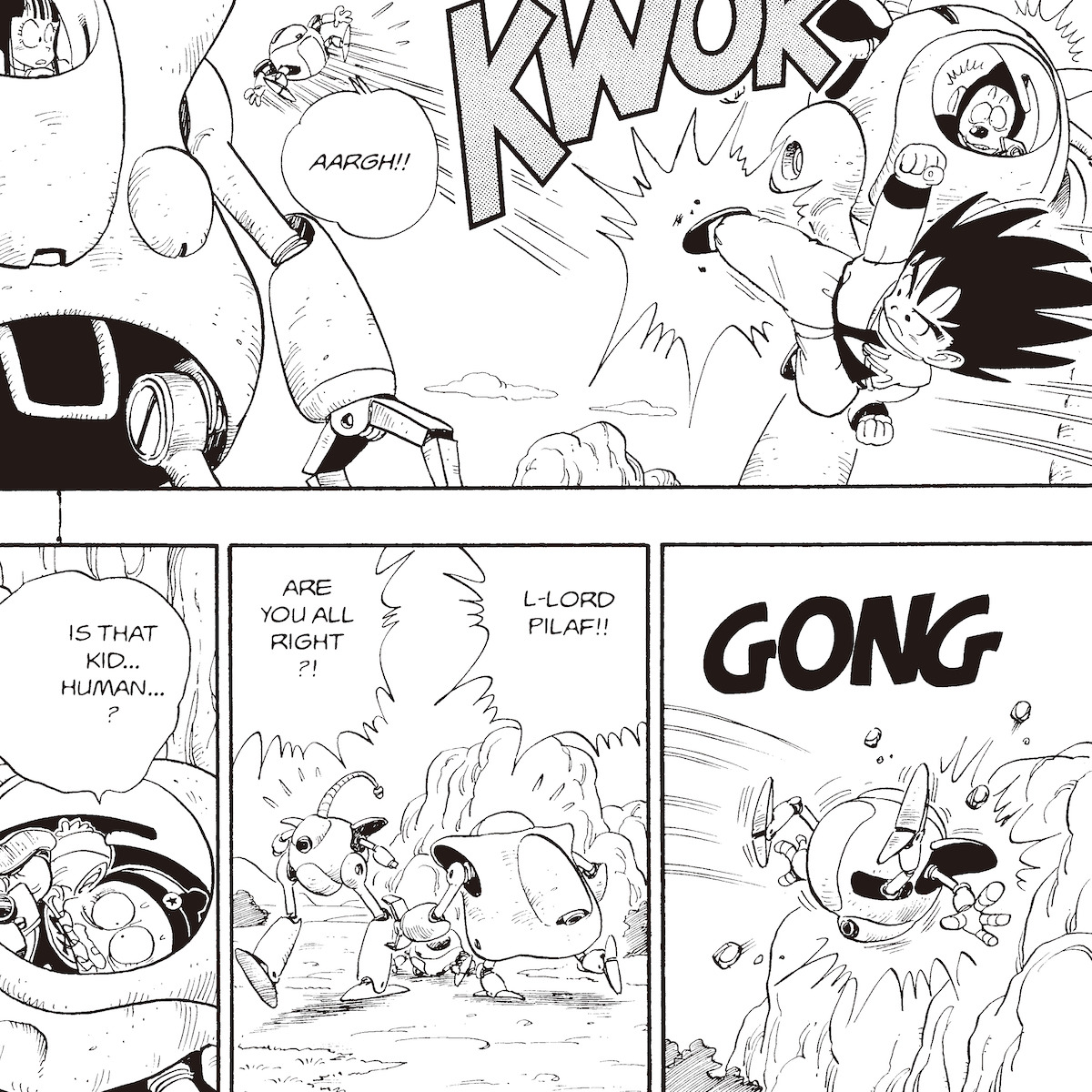
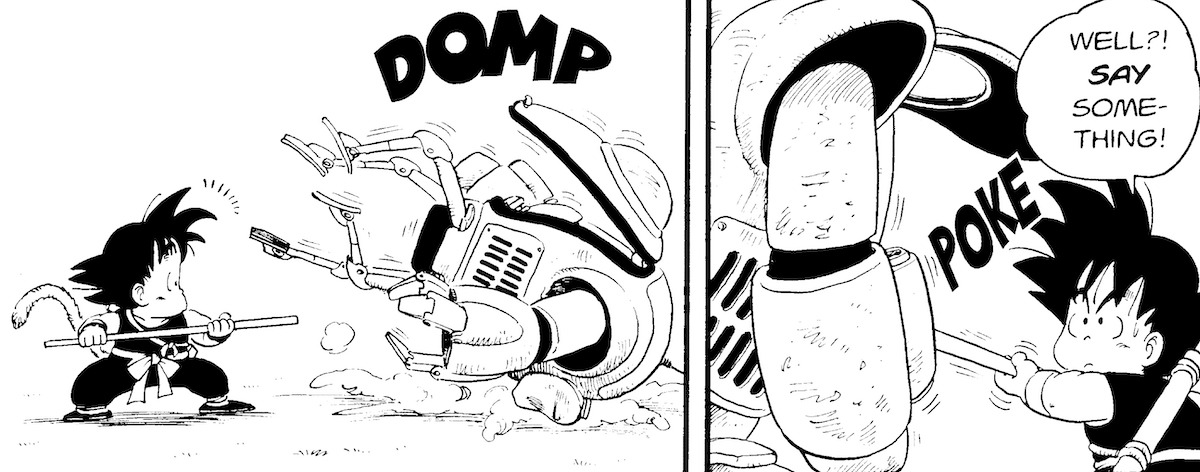
Die Pilaf Machine geht nach einem Tritt von Goku nicht kaputt.
—Das ergibt Sinn. Wenn es nicht leicht wäre, könnten diese dünnen Beine den Körper nicht tragen.
Yoshida:Die Schwierigkeiten beim Bau eines Roboters liegen genau darinwie man sein Gewicht kontrolliert. Bei einer Verdoppelung der Höhe vervierfacht sich der Querschnitt und das Volumen verachtfacht sich, sodass das Gewicht proportional zunimmt. Da der ARCHAX 3,5 Tonnen wiegt, wäre es eine enorme Belastung für die beiden Beine, dieses Gewicht auf nur zwei Beinen zu tragen. Da die Sicherheit des Piloten für uns oberste Priorität hat, müssen wir außerdem sicherstellen, dass er nicht umkippt. Ein 4,5 Meter hoher ARCHAX wäre genauso gefährlich, wenn er umfallen würde, wie wenn ein schwerer Lastwagen umkippt.
— Wie steht es um das Design? Der ARCHAX hat im Vergleich zur abgerundeten Form der Pilaf Maschinen ein sehr scharfes und eckiges Design.
Yoshida:Eine Designmethode namensTopologieoptimierungist vor kurzem aufgetaucht. Dabei handelt es sich um eine computergestützte mathematische Methode, die automatisch berechnet, wie Material angeordnet werden muss, um eine optimale Struktur zu schaffen. Mit dieser Methode ist es möglich, ein abgerundetes, stromlinienförmiges Design wie dieses zu erstellen.
.jpg?_=1785613560)
Ein mithilfe der Topologieoptimierung erstelltes Design.
—Die Oberfläche sieht runder aus, anders als bei typischen Robotern.
Yoshida:Mit diesem Design wird auch eine angemessene Haltbarkeit gewährleistet. Die meisten Maschinen heutzutage, einschließlich Roboter, werden mit Blick auf eckige und flache Oberflächen entworfen. Dies liegt an den technischen und materiellen Einschränkungen, die das Erstellen von Kurven erschweren. Diese Art von Design führt jedoch häufig zu unnötigem Gewicht und übermäßiger Haltbarkeit. Auf der anderen Seite eliminieren KI-optimierte Designs diese unnötigen und übermäßigen Aspekte. Man könnte sagen, das Design ist dem eines lebenden Organismus näher.
— Die Rundungen der Pilaf Maschinen wirken beinahe organisch. Wenn man darüber nachdenkt, sind die Körper von Lebewesen meist sehr logisch aufgebaut.
Yoshida:Genau. Das Design von Pilaf Maschinen kann das Ergebnis gründlicher Optimierung.
Apropos lebende Organismen: Eine Sache, die mir bei den Pilaf Maschinen aufgefallen ist, war ihr Sichtfeld. Menschen überprüfen beim Gehen unbewusst ihre Umgebung, um sicher zu sein. Dies ist ein Grund dafür, dass das Stolpern wahrscheinlicher wird, wenn man beim Gehen auf sein Telefon schaut. Das wird Ihnen beim Fahren mit dem ARCHAX sofort klar, denn Sie werden nervös und denken: „Ist etwas hinter mir? Unter mir?“ Deshalb ist die Gewährleistung eines angemessenen Sichtfelds bei der Entwicklung dieser Art von steuerbaren Robotern von entscheidender Bedeutung. Auf den ersten Blick scheint es jedoch, dass das Sichtfeld der Pilaf Maschinen ausschließlich auf der Frontscheibe beruht und keine externen Kameras verwendet. Ich bin gespannt, wie die Sicht nach hinten gewährleistet ist.
Der ARCHAX ist übrigens mit neun externen Kameras ausgestattet.
—Ich verstehe. Es wäre wichtig, ein ausreichendes Sichtfeld zu gewährleisten, um einen Roboter reibungslos bedienen zu können, oder? Außerdem ist mir aufgefallen, dass die Pilaf Maschinen hebelgesteuert sind, aber ist das eine Funktion, die sie mit dem ARCHAX teilen?
Pilaf scheinen mit einem Hebel bedient zu werden.
Yoshida:Die Pilaf Maschinen scheinen über Hebel bedient zu werden, Allerdings ist es äußerst schwierig, komplexe Bewegungen nur mit Hebeln auszuführen. Im Allgemeinen können Hebel zwei Eigenschaften steuern: „Position“ und „Geschwindigkeit“. Feinere Bewegungen würden eine präzisere Kontrolle über den Druck und den Winkel des Hebels erfordern. Es wäre schwierig, menschliche Bewegungen wie das Greifen mithilfe von Hebeloperationen nachzubilden.
— Die Maschine, auf der Pilaf reitet, kann mit dem Zeigefinger zeigen, was darauf hindeutet, dass sie zu ziemlich präzisen Bewegungen fähig ist.
Yoshida:Der ARCHAX verfügt außerdem über fünf Finger, sodass er per Knopfdruck verschiedene Aktionen ausführen kann, wie beispielsweise ein Peace-Zeichen oder andere voreingestellte Posen.
.jpg?_=1785613560)
Sobald Sie sich an die Steuerung des ARCHAX gewöhnt haben, können Sie Ihre Finger präziser bewegen.
Im Gegensatz zum Menschen ist es jedoch nicht in der Lage, unbegrenzte Muster zu erstellen. In dieser Hinsicht zeigen die Pilaf -Maschinen Bewegungen dem Menschen recht ähnlich, etwa wenn er seine Hand öffnet, wenn er überrascht wird. Es ist möglich, dass die Maschine eine Zukunftstechnologie nutzt, wie etwa eine Art neuronale Verbindung (Anmerkung des Herausgebers: ein System, das das Gehirn des Piloten mit dem Roboter verbindet und es ermöglicht, ihn über Gehirnströme zu steuern), wodurch Bewegungen möglich werden, die der menschlichen Absicht sehr nahe kommen.
—Alle drei Pilaf Maschinen können miteinander kombiniert werden, wodurch die kombinierte Pilaf Machine entsteht. Gab es etwas, das Ihnen an dieser Fähigkeit aufgefallen ist?
Yoshida:Als Roboterdesigner konnte ich nicht anders, als mich zu fragen,Wenn es drei Piloten gibt, wie ist die Steuerung aufgeteilt?? Beispielsweise gibt es bei Passagierflugzeugen mit mehreren Betreibern ein klar definiertes System, das dem Kapitän und dem Copiloten mitteilt, wofür sie zu welchem Zeitpunkt verantwortlich sind. Sobald die Pilaf Maschinen zusammengeführt wurden, wird die Maschine von Kaiser Pilaf zum Kopf, sodass Pilaf möglicherweise die Kontrolle über die Steuerung hat, die beiden anderen jedoch möglicherweise ebenfalls ein begrenztes Maß an Kontrolle haben.
Ist Emperor Pilaf für die Steuerung der kombinierten Pilaf -Maschine verantwortlich?
— Glauben Sie, dass es sich um ein System handelt, bei dem die anderen beiden Piloten die Kontrolle übernehmen können, wenn es ein Problem mit dem Kopf des Roboters gibt?
Yoshida: Das ist durchaus möglich. Ich denke, dass in einer solchen Situation die Kontrolle automatisch an die anderen Piloten übergeben würde. Der ARCHAX beispielsweise kann sowohl vom Piloten im Cockpit als auch über ein Fernsteuerungssystem gesteuert werden. Die Kontrolle kann jedoch nur vom Cockpit aus übertragen werden, um zu verhindern, dass jemand von außen die Kontrolle über den ARCHAX übernimmt, während sich noch ein Pilot darin befindet.
—Auch die Struktur der kombinierten Pilaf Machine interessiert mich. Wenn sie kombiniert werden, klappen die Beine des großen Roboters in der Mitte nach innen ein, sodass in seinem Körper viel Freiraum vorhanden sein muss. Aber wäre dort noch Platz für eine Energiequelle?
Yoshida:Es ist möglich, dass in der Welt von Dragon Ball Es wurden erhebliche Fortschritte bei der Miniaturisierung von Energiepaketen und Batterien erzielt. Sogar in unserer eigenen Welt können wir beobachten, dass Batterien für verschiedene Arten von Geräten immer kleiner werden. Aber natürlich sieht es bei Waffen ganz anders aus. Der Roboter mit den langen Beinen verwendet auch Raketen und es ist ein Wunder, wo er all das Zeug in seinem Körper verstaut.
—Der Langbeiner hat außerdem einen Flammenwerfer, also muss er irgendwo Brandbeschleuniger wie Schießpulver und Sprengstoff aufbewahren.
Yoshida: Ja, die Düse dieses Flammenwerfers fungiert als Verbindungsstück, wenn die Roboter sich verbinden, also ist sie ein lebenswichtiges Gerät. Sie bewegt sich auch wie ein Schwanz oder ein Hals, also frage ich mich, ob sie über eine Art neuronale Verbindung mit Gedanken gesteuert wird ...
—Sind „kombinierende Roboter“ mit unserer aktuellen Technologie möglich?
Yoshida: Damit ein Roboter auf diese Weise zusammenwirken kann, muss esein Grund für ihre Zusammenlegung. Der Roboter wird nach der Kombination deutlich schwerer und Sicherheitsfunktionen werden schwieriger zu implementieren sein. Allerdings kommen wir dann wieder auf die Frage zurück, ob es überhaupt notwendig ist, dass Menschen in Robotern mitfahren ... (lacht).
— Abgesehen von der Notwendigkeit bauen Sie den ARCHAX letztendlich, weil Sie in einem Roboter mitfahren möchten, richtig?
Yoshida:Oh, ganz bestimmt. Und ich kann mir vorstellen, dass Emperor Pilaf den gleichen Wunsch hatte, selbst einen Roboter zu steuern. Ich meine, die Welt von Dragon Ball ist voller fortschrittlicher Technologie, also muss es jede Menge unbemannter Roboterwaffen geben, aus denen er wählen könnte. Es gibt keinen logischen Grund, in einen bewaffneten Roboter einzusteigen und ihn zu steuern, wenn man das Verletzungs- oder Todesrisiko bedenkt. Also, Pilaf liebt definitiv Roboter (lacht). Ich glaube, ich würde mit ihm klarkommen.Ich würde ihn gerne fragen, welches Betriebssystem er verwendet, oder mit ihm Konzeptentwürfe besprechen..
.jpg?_=1785613560)
Yoshida glaubt, dass er mit Pilaf klarkommen würde.
—Sie glauben also, dass Pilaf davon geträumt hat, einen Roboter zu steuern, so wie viele Menschen?
Yoshida:Ich denke schon. Heutzutage können sogar viele Baumaschinen wie Bagger ferngesteuert werden, und die VR- und KI-Technologie wird sich immer weiter verbessern. Ich glaube, wir nähern uns einem Zeitalter, in dem alles, was Menschen tun, von Robotern erledigt werden könnte. Und wenn das passiert, wird dies die Vorstellung menschlicher Identität in Frage stellen, und die Menschen werden vielleicht mit neuem Interesse auf die einfache Freude blicken, die es bereitet, selbst eine Maschine zu fahren und zu steuern.
—Ja, es kann sein, dass man Wert auf Dinge legt, die nicht gerade rational sind. Roboter zu kombinieren ist einfach so cool, und die Art und Weise, wie Pilaf seinen eigenen Roboter entworfen hat, den er auch steuert, scheint tatsächlich eine Art und Weise zu sein, wie die Menschen in Zukunft auf die KI-Automatisierung reagieren könnten.
Yoshida:Ja, das glaube ich. Ich fahre zum Beispiel ein Auto mit manueller Schaltung, obwohl ich weiß, dass das im Grunde sinnlos ist, da Automatik die Norm ist. Ich liebe einfach das taktile Feedback, wenn ich selbst schalte.
.jpg?_=1785613560)
— Es überrascht nicht, das von jemandem zu hören, der seinen eigenen steuerbaren Roboter baut (lacht).
—Was war Ihr ursprünglicher Grund dafür, einen steuerbaren Roboter bauen zu wollen?
Yoshida: Meine Begründung war einfach: Ich dachte, es würde Spaß machen! Bei einem anderen Unternehmen, das ich gegründet hatte (ALTs), entwarf ich Armprothesen, die mit subtilen Muskelbewegungen gesteuert werden konnten. Außerdem habe ich Roboter schon immer geliebt, und das liegt vielleicht alles an Medien wie Dragon Ball!
Derzeit plane ich einen Roboter-Themenpark, dessen Eröffnung für 2027 geplant ist. In diesem Themenpark möchte ich den Besuchern die Möglichkeit geben, auf Robotern zu reiten, an Katastrophenrettungssimulationen teilzunehmen und sportähnliche Spiele zu spielen. Ich glaube, ein Großteil der Welt verbindet Roboter mit der japanischen Kultur, deshalb möchte ich, dass der Park auch diese Seite der japanischen Kultur fördert. Was wir anstreben, ist keine Science-Fiction, sondern „wissenschaftliche Realität“, die das Imaginäre in die reale Welt bringt.
— Wir würden gerne kombinierende Roboter wie die Pilaf Machine sehen!
Yoshida: Solange wir die Sicherheitsfreigabe dafür bekommen (lacht).
Interviewer/Autor: Hotaka Sugimoto
Fotografie: Kayo Sekiguchi
Diese Seite enthält maschinell erstellte Übersetzungen. Es kann daher vorkommen, dass seltsame oder schwer verständliche Ausdrücke auftauchen. Wir bitten um euer Verständnis.